专业力值测量技术研究,传感器制造商
品质稳定、性能优良、性价比高
品质稳定、性能优良、性价比高
咨询热线:周经理:18921011531


189-2101-1531
网址:www.acltchina.com

品质优良、品质保证层层质检、严格把控品质1、应用误差是操作人员产生的,这也意味着产生的原因很多,例如,温度测量时产生的误差,包括探针放置错误或探针与测量地点之间不正确的绝缘,另外一些应用误差包括空气或其他气体的净化过程中产生的错误,秦皇岛供应拧紧力传感器厂家应用误差也涉及变送器的错误放置,因而正或负的压力将对正确的读数造成影响。2、特性误差定义为,设备本身固有的,它是设备理想的、公认的转移功能特性和真实特性之间的差,这种误差包括DC漂移值、斜面的不正确或斜面的非线形。动态误差许多传感器的特性和校准都是适用静态条件下的,供应拧紧力传感器厂家这意味着使用的输入参数是静态或类似于静态的,许多传感器具有较强阻尼,因此它们不会对输入参数的改变进行快速响应,如,热敏电阻需要数秒才能响应温度的阶跃改变。

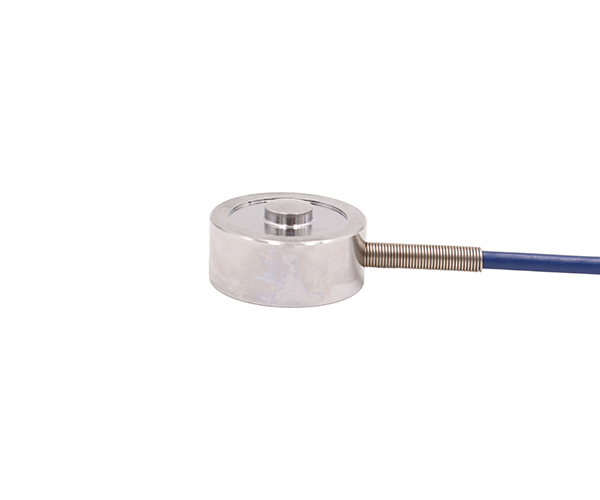
传感器是一种能够将重力转变成电信号的力-电转换装置,是电子衡器的关键性部件。秦皇岛供应拧紧力传感器应变计主要由敏感栅、基底、被覆层和引线等所组成,能够实现力电转换的传感器有很多种类,常见的有电阻应变式、电磁力式和电容式等。称重模块是一种用于传感器的实用性结构部件。供应拧紧力传感器厂家为了适应各种衡器的结构安装需要,传感器做成了各种各样的结构形式,称重传感器是力学传感器中一大重要类别,应用也为广泛,其形式也有很多。构建传感器总的来说主要有弹性体、应变计、密封等等。
在某些应用方面,力传感器能比视觉传感器更加实用、便捷,而且价格实惠。今天,笔者就为大家带来力传感器上的五大应用。多年以来,秦皇岛供应拧紧力传感器厂家视觉传感器的应用都比力传感器要广泛,往往能在工业生产上起到更大的作用,而相对的力传感器就没那么受欢迎。但在某些应用方面,力传感器能比视觉传感器更加实用、便捷,而且价格实惠。今天,笔者就为大家带来力传感器上的五大应用。感测可以通过机械臂上内嵌的力传感器获得,目前市场上的大部分协作机器人已经具备。秦皇岛供应拧紧力传感器使用内置力传感器的缺点是,你没有一个精度相同的设备可以把力“读”出来。大多是内置力传感器都是通过读取机器人的电流来测量力的。当然,有些力传感器采用的是其他方式,例如根据材料变形来确定施加在上面的力的大小。

切削过程传感器检测的目标有切削过程的切削力及其变化、切削过程颤震、刀具与工件的接触和切削时切屑的状态及切削过程辨识等,而最重要的传感参数有切削力、切削过程振动、切削过程声发射、切削过程电机的功率等。供应拧紧力传感器对于机床的运行来讲,主要的传感器检测目标有驱动系统、轴承与回转系统、温度的监测与控制及安全性等,其传感器参数有机床的故障停机时间、秦皇岛供应拧紧力传感器被加工件的表面粗糙度和加工精度、功率、机床状态与冷却润滑液的流量等。

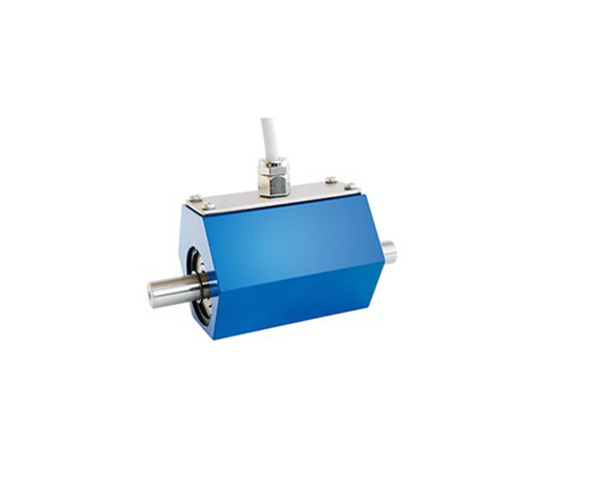
多维力传感器怎么工作的呢?如果需要测量机器人多个矢量轴的力或扭矩,我们推荐使用“多分量传感器”:与安装多个传感器相比,秦皇岛供应拧紧力传感器厂家多分量传感器节省了大量的空间和安装工作。选择合适的多分量传感器时,考虑“串扰”尤为重要。多轴传感器(也称为多分量传感器)可测量多个空间方向上的力/扭矩, 其不仅可以测量 x,y,z 方向的力,还可以测量在这三个方向的扭矩。如果扭矩与力一起测量,多轴传感器可以测量多达六个分量(3xF,3xM)。 多种应用 通过这种方式,一个多分量传感器就可以进行三个方向的物理量测量。这个特点使其非常适合测定涉及 x,y 和 z 向量负载的应用。供应拧紧力传感器厂家典型的应用包括机器人极限载荷监测,机器监测(如在飞机装配和隧道掘进机),以及多种测试台(如轮胎测试或平衡设备),离岸应用的结构测试等。
秦皇岛供应拧紧力传感器一般都是用在铝合金材质的传感器上面,其所用的方式和材质绝定了铝合金感器只能用在一般环境中。所选用的传感器弹性体都是合金钢或者是不锈钢。传感器时,都会看到每一只传感器所标注的防潮密封IP等级,每只传感器根据材质和封装的艺不同,所在的IP防护等级也是不同的。传感器防潮和密封主要分为两类,一种是胶封,一种是激光焊接封装,相对于两者,供应拧紧力传感器厂家胶封使用成本低,简单,而激光焊接工艺会复杂,且会增加成本,其两者在同一环境中使用,有着本质的区别。
电话/TEL
189-2101-1531
公司地址
苏州市苏州高新技术产业开发区长江路465号4130室
邮箱/EMAIL
info@fibos.cn
工厂地址
常州市武进区国家高新技术产业开发区新辉路12-1号 凤墅工业园B3-A

扫一扫添加微信咨询

